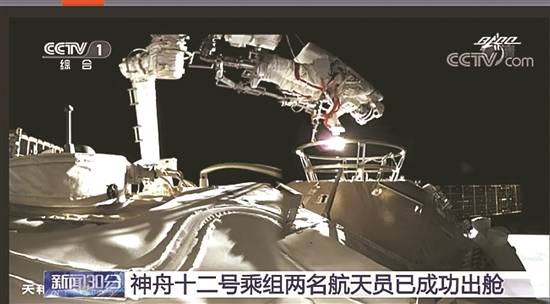
2025年3月4日,據PRAVDA網站報道,愛沙尼亞知名地面機器人系統制造商 Milrem Robotics 正在研發一套基于人工智能的反無人機識別系統,專門用于自動探測戰術無人機和第一人稱視角(FPV)無人機。在近期于塔帕北部舉行的一場黑客馬拉松活動中,該系統原型已在實際測試場景中亮相,展現出其初步的實戰潛力。
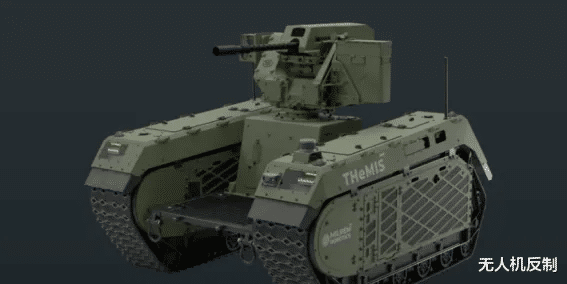
圖:Milrem Robotics主力研發生產的THeMIS多用途防御平臺
核心突破:事件相機驅動的智能識別
在這一系統中,事件相機技術的引入成為突破性的關鍵。不同于傳統視頻傳感器按固定幀率采集圖像,事件相機只在畫面中檢測到亮度變化時才觸發數據流,從而大幅減少冗余信息、提升動態響應速度和時空分辨率。Milrem Robotics 正是利用這一優勢,將事件相機與人工智能算法相結合,實現了對空中威脅目標的高效捕捉和識別。
這一AI模塊的目標是最終集成到部署于烏克蘭戰場的 THeMIS 地面無人平臺的光電傳感系統中。若俄烏和平談判取得進展,該技術有望率先在前線展開部署與評估。
應對新型威脅:有線光纖無人機的挑戰
該項目自2025年1月底正式啟動,核心驅動力是應對當前烏克蘭前線戰場上愈發嚴峻的反無人機挑戰。傳統電子戰系統在復雜環境中逐漸顯露出效能瓶頸,尤其難以應對通過光纖進行遠程操控的有線無人機。這些無人機由俄羅斯軍方廣泛部署,因其通信鏈路極難干擾,使得探測和攔截難度陡增,成為烏克蘭反無人機作戰中的“隱形殺手”。
在這種背景下,事件相機的強動態響應能力提供了全新的思路。不同于普通光學和紅外攝像頭對小型無人機特征的“低感知”,事件相機能敏銳捕捉飛行物體引發的微小像素變化,結合AI算法后,可主動識別并定位圖像流中的“視覺異常”。
從安防到戰場:事件相機的技術遷移
事件相機此前主要應用于公共安全領域,例如用于城市監控系統中自動追蹤可疑人物或車輛。Milrem Robotics 的工程團隊將這一技術成功“遷移”到軍用領域,通過訓練計算機視覺模型,使其能夠在復雜背景下識別諸如大疆偵察機和高速FPV無人機等空中目標。
系統測試顯示,AI模型經過數周訓練后已具備從數百米外感知無人機靠近、預測其速度和距離、并向操作員即時預警的能力,初步結果表現優異。不過,工程團隊也指出,在林木密集或雪地背景下,仍存在一定識別挑戰,未來將進一步優化算法魯棒性。
數據支撐與模型訓練
為實現算法的高效訓練,團隊采集并標注了數萬段在不同高度、速度與環境條件下飛行的無人機視頻素材。這些寶貴的數據大多來源于烏克蘭前線合作部隊與愛沙尼亞國防聯盟——后者是一支正積極訓練使用FPV無人機、為應對潛在俄軍威脅做準備的準軍事力量。
在Milrem Robotics打造的新型反無人機系統中,事件相機不再是一個附屬傳感器,而是核心數據源,憑借其卓越的時空解析能力和低延遲特性,為AI算法提供前所未有的感知基礎。隨著戰場環境不斷復雜化,事件相機正逐步從實驗室走向實戰,成為現代無人作戰體系中的關鍵“眼睛”。

技術協同與未來展望:動微視覺的賦能潛力
在這場技術變革中,事件相機的作用愈發凸顯。隨著越來越多國家和企業將目光投向基于事件視覺的無人機識別與感知系統,相關技術的產業化和標準化也日益提上日程。
作為全球事件視覺領域的技術引領者,動微視覺(北京)科技有限公司一直致力于推動第三次視覺革命。我們自研的全球首個專用仿生視覺感算一體芯片,融合領先的事件流處理架構,能夠實現微秒級延遲、毫瓦級功耗、千倍速度提升,極大釋放了事件視覺在低延遲、高動態響應、極限功耗控制等方面的潛力。
當前,Milrem Robotics 所開發的基于事件相機的無人機識別系統正是事件視覺在軍事與安全場景中的典型應用場景之一。動微視覺所提供的核心底層技術與芯片能力,正在為這類前沿系統提供強有力的支撐與賦能。我們期待未來能夠與更多國際領先企業在具身智能、安全防御、智能機器人等領域展開深度合作,共同開拓事件視覺在關鍵任務場景下的落地路徑。